3.8:二分图 二分图,又称二部图,英文名叫 Bipartite graph。
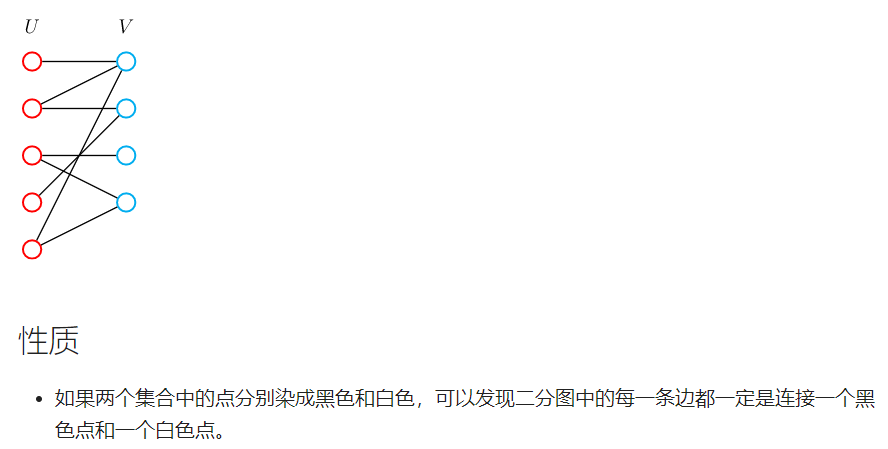
二分图是什么?节点由两个集合组成,且两个集合内部没有边 的图。
换言之,存在一种方案,将节点划分成满足以上性质的两个集合。
3.8.1:染色法判定二分图
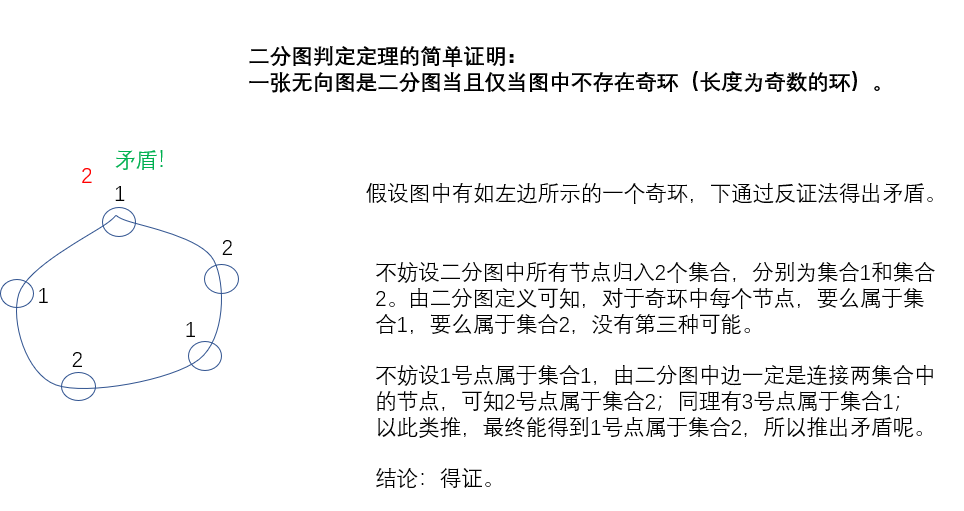
二分图判定定理:一张无向图是二分图当且仅当图中不存在奇环(长度为奇数的环)。
简单证明:
以上证明必要性。
例题:860. 染色法判定二分图(模板题)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 给定一个 n 个点 m 条边的无向图,图中可能存在重边和自环。 请你判断这个图是否是二分图。 输入格式 第一行包含两个整数 n 和 m。 接下来 m 行,每行包含两个整数 u 和 v,表示点 u 和点 v 之间存在一条边。 输出格式 如果给定图是二分图,则输出 Yes,否则输出 No。 数据范围 1 ≤n,m≤10 ^5 输入样例: 4 4 1 3 1 4 2 3 2 4 输出样例: Yes
染色法可以用DFS或者BFS实现。它可以处理重边和自环。
注意:二分图不一定是连通图。所以需要把每个点都搜一遍。
处理所有边和所有点,时间复杂度:O(n+m)。
算法1:DFS版本。
代码思路:
染色可以使用1和2区分不同颜色,用0表示未染色;
遍历所有点,每次将未染色的点进行dfs, 默认染成1或者2;
由于某个点染色成功不代表整个图就是二分图,因此只有某个点染色失败才能立刻break/return;
染色失败相当于存在相邻的2个点染了相同的颜色。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 #include <iostream> #include <cstring> #include <algorithm> using namespace std ;#define IOS \ ios::sync_with_stdio(false ); \ cin .tie(0 ); \ cout .tie(0 ) const int N = 1e5 +5 ,M = 2e5 +5 ;int n,m;int color[N];int h[N], e[M], ne[M], idx;void add (int a,int b) e[idx] = b,ne[idx] = h[a],h[a] = idx ++; } bool dfs (int u,int c) color[u] = c; for (int i = h[u]; ~i;i = ne[i]){ int j = e[i]; if (!color[j]){ if (!dfs(j,3 - c)) return false ; } else if (color[j] == c) return false ; } return true ; } int main () IOS; cin >> n >> m; memset (h, -1 , sizeof h); while (m -- ){ int u,v; cin >> u >> v; add(u,v),add(v,u); } bool flag = true ; for (int i = 1 ;i <= n;i ++){ if (!color[i]){ if (!dfs(i,1 )){ flag = false ; break ; } } } if (flag) cout << "Yes\n" ; else cout << "No\n" ; return 0 ; }
算法2:BFS版本。 改写成BFS,这样搜索不会像DFS可能造成栈溢出。
代码思路:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 #include <iostream> #include <queue> #include <cstring> #include <algorithm> using namespace std ;#define IOS \ ios::sync_with_stdio(false ); \ cin .tie(0 ); \ cout .tie(0 ) const int N = 1e5 +5 ,M = 2e5 +5 ;int n,m;int color[N];int h[N], e[M], ne[M], idx;void add (int a,int b) e[idx] = b,ne[idx] = h[a],h[a] = idx ++; } bool bfs (int u,int c) queue <int > q; color[u] = c; q.push(u); while (q.size()){ int t = q.front(); q.pop(); for (int i = h[t]; ~i;i = ne[i]){ int j = e[i]; if (!color[j]){ color[j] = 3 - color[t]; q.push(j); } else if (color[j] == color[t]) return false ; } } return true ; } int main () IOS; cin >> n >> m; memset (h, -1 , sizeof h); while (m -- ){ int u,v; cin >> u >> v; if (u != v) add(u,v),add(v,u); } bool flag = true ; for (int i = 1 ;i <= n;i ++){ if (!color[i]){ if (!bfs(i,1 )){ flag = false ; break ; } } } if (flag) cout << "Yes\n" ; else cout << "No\n" ; return 0 ; }
3.8.2:匈牙利算法 参考资料: https://www.renfei.org/blog/bipartite-matching.html。(很不错!)
二分图的最大权匹配是指二分图中边权和最大的匹配。
Hungarian Algorithm(Kuhn-Munkres Algorithm)
匈牙利算法又称为 KM 算法,可以在O(n^3)时间内求出二分图的 最大权完美匹配 。
时间复杂度:O(n*m),常数小,实际运行时间远小于O(n*m)。
y总讲解: https://www.acwing.com/video/25/ 1:18:48。(有意思!)
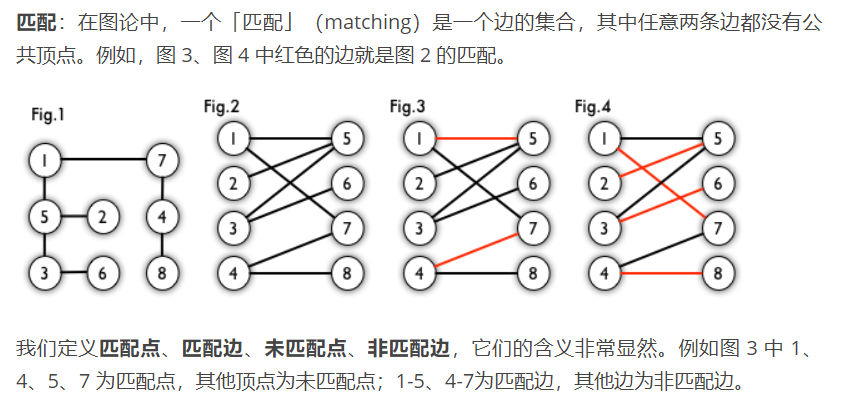
最大匹配 :一个图所有匹配中,所含匹配边数最多的匹配,称为这个图的最大匹配。图 4 是一个最大匹配,它包含 4 条匹配边。
完美匹配 :如果一个图的某个匹配中,所有的顶点都是匹配点,那么它就是一个完美匹配。图 4 是一个完美匹配。显然,完美匹配一定是最大匹配(完美匹配的任何一个点都已经匹配,添加一条新的匹配边一定会与已有的匹配边冲突)。但并非每个图都存在完美匹配。
举例来说:如下图所示,如果在某一对男孩和女孩之间存在相连的边,就意味着他们彼此喜欢。是否可能让所有男孩和女孩两两配对,使得每对儿都互相喜欢呢?图论中,这就是完美匹配 问题。如果换一个说法:最多有多少互相喜欢的男孩/女孩可以配对儿?这就是最大匹配 问题。
例题:861. 二分图的最大匹配(模板题)
二分图的匹配:给定一个二分图 G,在 G 的一个子图 M 中,M 的边集 {E} 中的任意两条边都不依附于同一个顶点,则称 M 是一个匹配。
二分图的最大匹配:所有匹配中包含边数最多的一组匹配被称为二分图的最大匹配,其边数即为最大匹配数。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 给定一个二分图,其中左半部包含 n1 个点(编号 1 ∼n1),右半部包含 n2 个点(编号 1 ∼n2),二分图共包含 m 条边。 数据保证任意一条边的两个端点都不可能在同一部分中。 请你求出二分图的最大匹配数。 输入格式 第一行包含三个整数 n1、 n2 和 m。 接下来 m 行,每行包含两个整数 u 和 v,表示左半部点集中的点 u 和右半部点集中的点 v 之间存在一条边。 输出格式 输出一个整数,表示二分图的最大匹配数。 数据范围 1 ≤n1,n2≤500 ,1 ≤u≤n1,1 ≤v≤n2,1 ≤m≤10 ^5 输入样例: 2 2 4 1 1 1 2 2 1 2 2 输出样例: 2
匈牙利算法前置概念。
交替路 :从一个未匹配点出发,依次经过非匹配边、匹配边、非匹配边…形成的路径叫交替路。
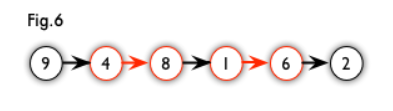
增广路 :从一个未匹配点出发,走交替路,如果途径另一个未匹配点(出发的点不算),则这条交替路称为增广路(agumenting path)。例如,图 5 中的一条增广路如图 6 所示(图中的匹配点均用红色标出):
增广路有一个重要特点:非匹配边比匹配边多一条。因此,研究增广路的意义是改进匹配 。
只要把增广路中的匹配边和非匹配边的身份交换即可。由于中间的匹配节点不存在其他相连的匹配边,所以这样做不会破坏匹配的性质。交换后,图中的匹配边数目比原来多了 1 条。
我们可以通过不停地找增广路来增加匹配中的匹配边和匹配点。找不到增广路时,达到最大匹配(这是增广路定理)。匈牙利算法正是这么做的。
存储图的时候只需要存储左半部指向右半部的边就行,因为是从左半部找匹配。
左右两个点集的编号可以是重复的,因为两集合是独立的。
优质题解: https://www.acwing.com/solution/content/5334/。
动图演示:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 #include <iostream> #include <cstring> #include <algorithm> using namespace std ;#define IOS \ ios::sync_with_stdio(false ); \ cin .tie(0 ); \ cout .tie(0 ) const int N = 510 ,M = 1e5 +5 ;int h[N],e[M],ne[M],idx;bool st[N];int match[N];int n1,n2,m;void add (int a, int b) e[idx] = b, ne[idx] = h[a], h[a] = idx ++ ; } bool find (int x) for (int i = h[x]; ~i;i = ne[i]){ int j = e[i]; if (!st[j]){ st[j] = true ; if (!match[j] || find(match[j])){ match[j] = x; return true ; } } } return false ; } int main () IOS; memset (h, -1 , sizeof h); cin >> n1 >> n2 >> m; while (m -- ){ int a,b; cin >> a >> b; add(a, b); } int res = 0 ; for (int i = 1 ;i <= n1;i ++){ memset (st,false ,sizeof st); if (find(i)) res ++; } cout << res << '\n' ; return 0 ; }
注意:每一轮find(i),st数组都会重置。
不理解建议手动模拟一组数据。(手动模拟一下会很好理解!)
匹配结果记录在match中,st数组用来判重,避免在某次匹配中重复遍历点和边。
st数组用来防止重复搜索相同的点。当图中有环的时候,不加st数组可能会无限循环下去,就出现段错误了。如果没有st数组,那么假设左边1与右边1匹配,左边2也与右边1匹配,那么在给左边第二个点找匹配的时候,就会有,去递归右边1的对象(左边1),继而左边1执行find(1)的时候因为不加st数组的原因会无限递归find(1),从而导致爆栈。
match数组用来记录右边妹子的男朋友在左边的编号。