3.6.3:Bellman-Ford 算法
一种基于松弛(relax)操作的 最短路算法,支持负权。简称BF算法。
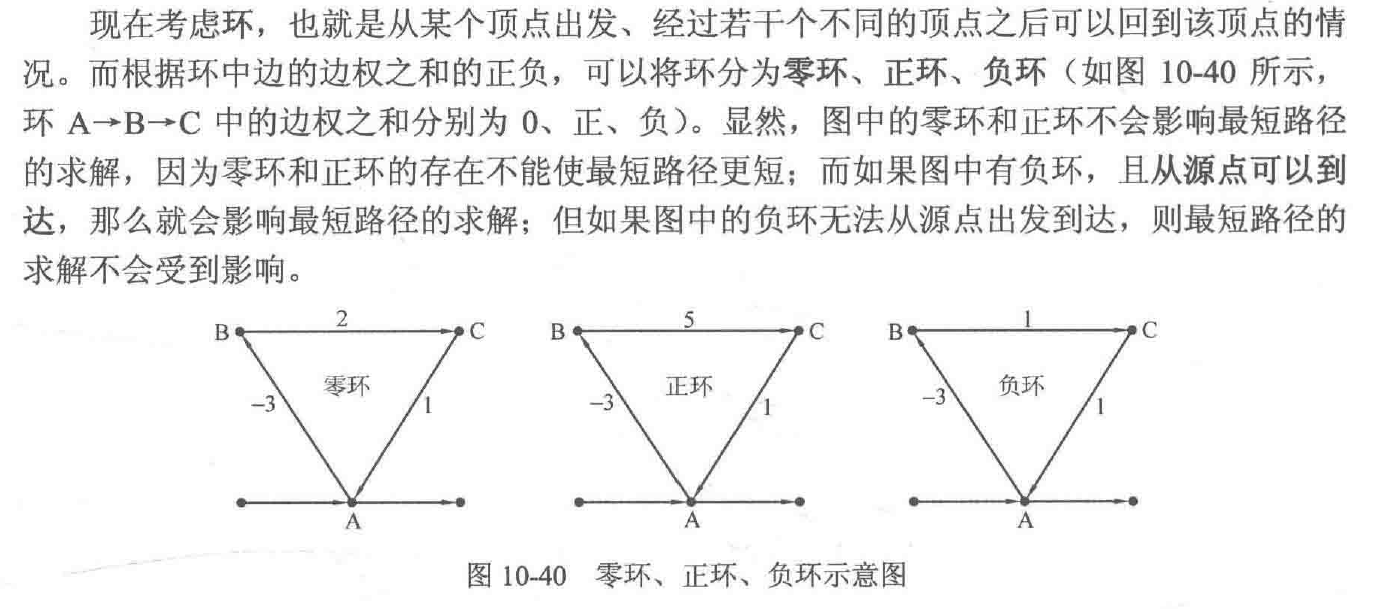
明确环的相关概念。
若图中从起点到终点的路上含有负环,那么不存在最短路,只要重复走负环,最短路会变为负无穷。
存在负权回路的图不一定存在最短路。
例题:853. 有边数限制的最短路(模板题)
1 | 给定一个 n 个点 m 条边的有向图,图中可能存在重边和自环, 边权可能为负数。 |
参考题解: https://www.acwing.com/solution/content/6320/。
Bellman-Ford 算法效率较低,代码难度较小。它比dijkstra算法更具普遍性,因为它对边没有要求,可以处理负权边,判断是否存在负权回路,缺点是时间复杂度高。
其原理为连续进行边松弛,在每次松弛时把每条边都更新一下,若在 n-1 次松弛后还能更新,则说明图中有负环,因此无法得出结果,否则就完成。
什么是松弛呢?
见前一讲,朴素版Dijkstra 算法。
若最外层循环k次,那么dist数组表示从1号点开始不超过k条边走到各个1点的距离。
参考资料: https://zhuanlan.zhihu.com/p/72185593。
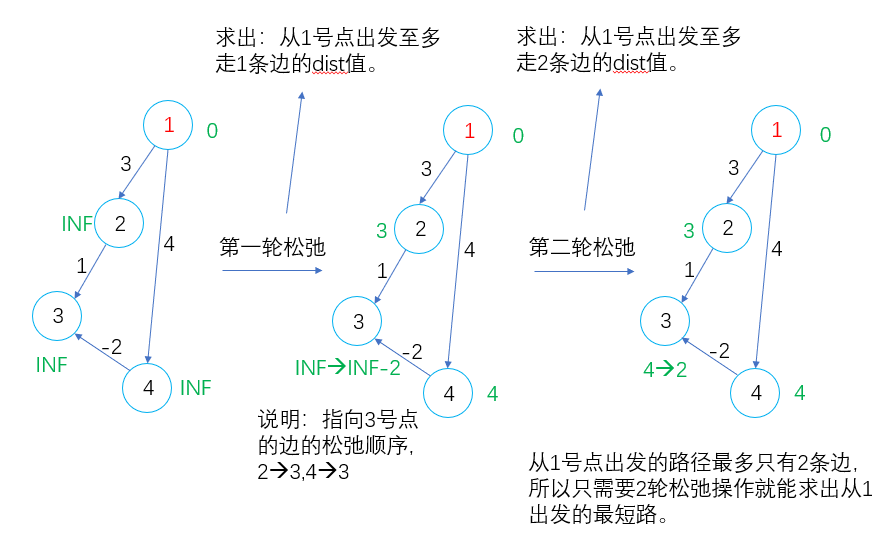
其主要思想:对所有的边进行n-1轮松弛操作,因为在一个含有n个顶点的图中,任意两点之间的最短路径最多包含n-1边。换句话说,第1轮在对所有的边进行松弛后,得到的是源点最多经过一条边到达其他顶点的最短距离;第2轮在对所有的边进行松弛后,得到的是源点最多经过两条边到达其他顶点的最短距离;第3轮在对所有的边进行松弛后,得到的是源点最多经过一条边到达其他顶点的最短距离……
可以发现,bellman - ford算法每轮边松弛操作更新dist数组类似BFS每次以起点为中心向外拓展距离+1的一圈点。
也就是说,若最外层循环k次,那么dist数组表示从1号点开始不超过k条边走到各个1点的距离。
若最外层循环到第n次,还有可以松弛的点,说明存在负环,因为含有n个点的图的最短路至多有n-1条边。
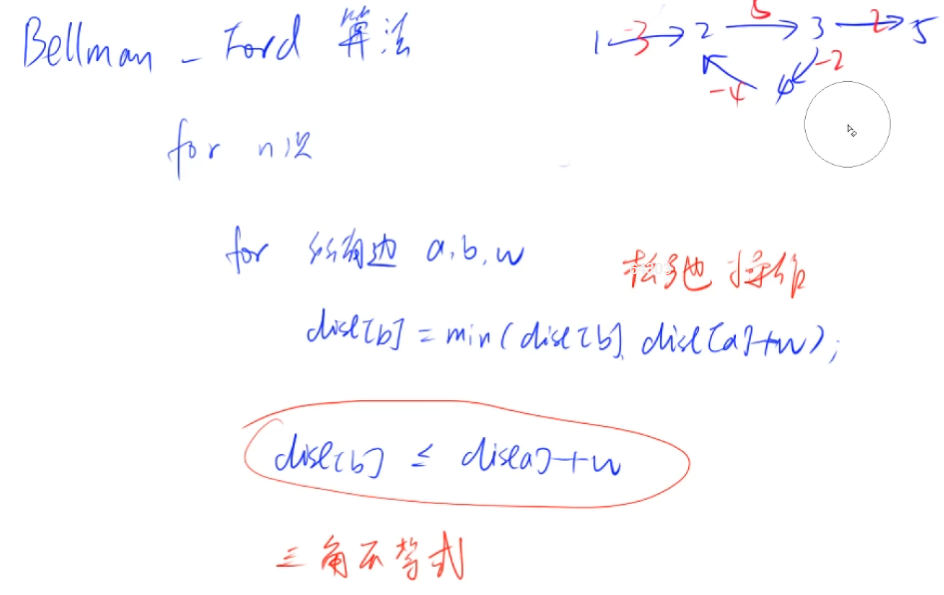
bellman - ford算法的伪代码实现:
1 | for n次 |
注意:back[] 数组是上一次迭代后 dist[] 数组的备份,由于是每个点同时向外出发,因此需要对 dist[] 数组进行备份,若不进行备份会因此发生串联效应,影响到下一个点。发生串联不能保证使用边数<=k。
也就类似数值分析中的雅可比迭代法(可能记错了,差不多意思),一轮迭代完所有方程,再进行下一轮的迭代。
如果不限制边数就不需要备份数组。
时间复杂度:O(n*m)。
1 |
|
在下面代码中,是否能到达n号点的判断中需要进行if(dist[n] > INF/2)判断,而并非是if(dist[n] == INF)判断,原因是INF是一个确定的值,并非真正的无穷大,会随着其他数值而受到影响,在上图的示例中就有变成INF-2的情况,所以dist[n]大于某个与INF相同数量级的数即可。
3.6.4:SPFA 算法
SPFA 算法(Shortest Path Faster Algorithm)是 Bellman-Ford算法 的队列优化算法的别称。
BF能处理边数限制的负权图,而SPFA不能处理边数限制。
缺点:时间复杂度不稳定,容易被卡,非负权图最好用Dijkstra(朴素或堆优化)来做。
关于spfa,它死了。—-NOI 2018
考试时要谨慎使用spfa,真被卡了,只能换BF。(交1次的题谨慎考虑,多次提交的题可以考虑)
考察BF算法的边松弛操作d[b] = min(d[b],backup[a] + w);,可知:只有当d[a]减小时才会更新d[b]。
换句话说,a是b的前驱节点,只有当一个点的前驱结点更新了,该节点才会得到更新;因此考虑到这一点,我们将创建一个队列,每一次加入距离被更新的节点。
参考题解: https://www.acwing.com/solution/content/9306/。
如何卡SPFA: https://www.cnblogs.com/luckyblock/p/14317096.html。
例题1:851. spfa求最短路(模板题)
1 | 给定一个 n 个点 m 条边的有向图,图中可能存在重边和自环, 边权可能为负数。 |
SPFA思路伪代码:
1 | queue <– 1 |
时间复杂度:一般O(m),最坏O(n*m)。
1 |
|
本题BF被卡,数据太大,只能过4个数据,用spfa才能AC。
st数组的作用:判断当前的点是否已经加入到队列当中了;已经加入队列的结点就不需要反复的把该点加入到队列中了,就算此次还是会更新到源点的距离,那只用更新一下数值而不用加入到队列当中。
也可以数组模拟队列,但是要写循环队列(节点会重复入队,数组容量有限),可以这样写,if (head == N) head = 0;if (tail == N) tail = 0;分别在出队入队时加上,保证队列循环。
Dijkstra算法和spfa算法中st数组的一个不同:前者一旦标记为true之后,就不在再变化;后者出队后,还可以重新入队。
Bellman_ford算法里最后return的判断条件写的是dist[n]>0x3f3f3f3f/2;而spfa算法写的是dist[n]==0x3f3f3f3f;其原因在于Bellman_ford算法会遍历所有的边,因此不管是不是和源点连通的边它都会得到更新;但是SPFA算法不一样,它相当于采用了BFS,因此遍历到的结点都是与源点连通的,因此如果你要求的n和源点不连通,它不会得到更新,还是保持的0x3f3f3f3f。
Bellman_ford算法可以存在负权回路,是因为其循环的次数是有限制的因此最终不会发生死循环;但是SPFA算法不可以,由于用了队列来存储,只要发生了更新就会不断的入队,因此假如有负权回路请你不要用SPFA否则会死循环。
补充:三种最短路算法的区别,https://www.acwing.com/solution/content/21057/。

